
The CDLI Collection
By making the form and content of cuneiform texts available online, the CDLI is opening pathways to the rich historical tradition of the ancient Middle East. In close collaboration with researchers, museums and an engaged public, the project seeks to unharness the extraordinary content of these earliest witnesses to our shared world heritage.
Search for publications, provenience, collection number, and more.
Latest accepted submissions
- Artifact update by Firth, Richard for Firth, Richard on 2024-04-24 at 08:41:14 UTC 5
- Other Entity update by Firth, Richard for Firth, Richard on 2024-04-24 at 08:35:09 UTC 1
- Other Entity update by Firth, Richard for Firth, Richard on 2024-04-24 at 08:34:02 UTC 1
- Artifact, Other Entity update by Firth, Richard for Firth, Richard on 2024-04-23 at 18:16:57 UTC 60
- Other Entity update by Firth, Richard for Firth, Richard on 2024-04-23 at 18:15:02 UTC 1
- Other Entity update by Firth, Richard for Firth, Richard on 2024-04-23 at 18:03:04 UTC 1
Highlights
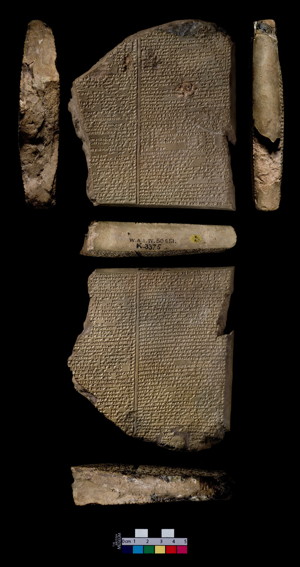
A Mesopotamian tale of a great flood and one survivor chosen by the Gods, this tablet caused a stir ...

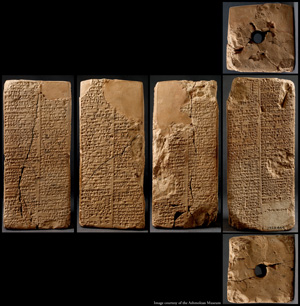
This royal inscription of Persian King Cyrus the Great commemorates his conquest of Babylon, portray...

This tri-lingual inscription has 414 lines in Old Persian cuneiform, 260 in Elamite cuneiform, and 1...

Tablet Plimpton 322 is one of the best known mathematical cuneiform texts. This text inspired a lot ...
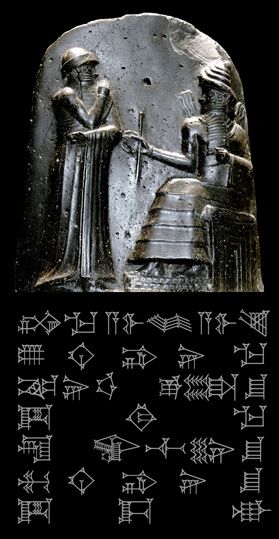
The stela of Hammurabi, now housed in the Louvre Museum, was found in Susa, where it was carried off...
The Weld-Blundell Prism or Sumerian Ki...
The Sumerian King List is an important chronographic document from ancient Mesopotamia. It lists a l...
News
- Time to test the CDLI development site! 2022-03-15
- Memorial video in honor of CDLI founder Robert K. Englund 2021-12-13
- CDLI Newsletter 2021/2: October 2021 2021-10-21
- CDLI Newsletter 2021/1: January 2021 2021-01-31
- CDLI Newsletter 2020/1: June 2020 2020-06-03
- Obituary for Robert K. Englund 2020-06-02